§ 2. Эффект переноса на уровне эффекторов
А. Двусторонний перенос
Всякий раз, когда эффекторная деятельность какой-либо конечности, будь то рука или нога, модифицируется вследствие тренировки симметричной конечности, говорят, что имеет место двусторонний перенос.
а) Факты. Вебер (1834) был одним из первых, кто отметил, что дети, обученные писать правой рукой, впоследствии легче рисуют левой рукой по зеркальному изображению. В 1858 году об этом же факте наряду с другими аналогичными наблюдениями сообщает Фехнер.
Самые первые систематические исследования этого явления были осуществлены Скрипчером, Смитом и Брауном (1894), а также Дэвисом (1898, 1900): опыты со сжиманием динамометра, постукиванием и попаданием в цель.
Свифт (1903) наблюдал эффект двустороннего переноса при игре в бильбоке. Этот опыт повторил Манн (1932), однако с целью более планомерного исследования. Испытуемые экспериментальной группы делали 50 попыток левой рукой, затем 500 попыток правой и, наконец, еще 50 - левой рукой. Испытуемые контрольной группы отличались от испытуемых экспериментальной группы тем, что они не тренировали правую руку. Сравнение результатов последних 50 попыток позволяет сделать следующие выводы:
1) Налицо эффект положительного двустороннего переноса. Результаты экспериментальной группы выше, чем результаты контрольной. В случае первой улучшение результата от первой ко второй серии проб левой рукой составляет 61,1%, в случае второй - 28,5%.
2) Такое улучшение результата отмечается у каждого испытуемого экспериментальной группы, причем различие результатов особенно заметно у тех из них, спонтанная способность которых была менее явно выражена.
Классическим методом изучения двустороннего переноса является черчение с помощью зеркала. Старч (1910) наблюдал положительный перенос в условиях, когда испытуемый тренировался в черчении с помощью зеркала сначала правой, а затем левой рукой. Интересно отметить, что черчение в направлении слева направо левой рукой осуществляется легче, если тренировка правой руки осуществлялась в направлении справа налево. При спонтанном движении обе руки функционируют симметрично по отношению к некой центральной плоскости.
Эверт (1926) уточнил это явление, а Брей (1928) показал, что двусторонний перенос возможен не только от одной руки к другой, но и в равной мере от руки к ноге. Он сравнил к тому же результаты, полученные в условиях предварительной тренировки правой руки, с результатами испытуемых, предупрежденных о том, как восприятие предмета в зеркале влияет на моторную координацию. Результаты предупрежденных таким образом испытуемых, работавших исключительно левой рукой, оказались промежуточными между результатами испытуемых контрольной группы, которые тренировали только левую руку, и результатами испытуемых экспериментальной группы с двусторонним переносом (см. рис. 4).
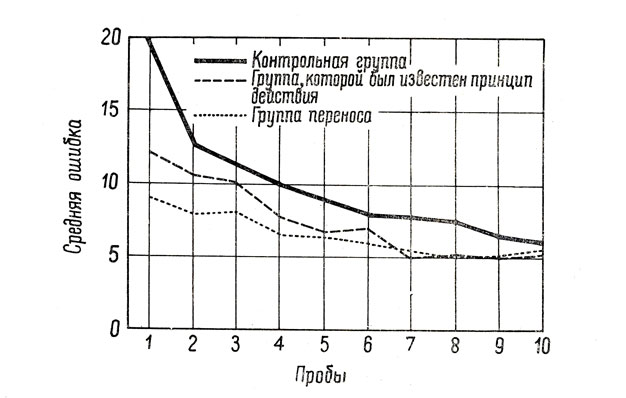
Рис. 4. Кривые, показывающие величину средней ошибки в контрольной и экспериментальной группах по отдельным сериям проб в ситуации двустороннего переноса (по Вудвортсу и Шлосбергу, 1954, стр. 742)
Этот опыт показывает, таким образом, что двусторонний перенос не является исключительно следствием знания движений, необходимых для компенсации инверсий, вызванных отражением в зеркале. Он является скорее результатом сенсомоторной координации такого рода, когда нахождение нужного направления с опорой на зеркальное отражение осуществляется в процессе прогрессивной адаптации, создающей новые автоматизмы. При этом не обязательно ясное знание законов отражения и их следствий. От одной конечности к другой передается именно навык сенсомоторной координации. Эта обучаемость сенсомоторной координации весьма различна у разных испытуемых, равно как и характер их эмоциональных реакций на ошибки, допускаемые при выполнении этой задачи.
Эта проблема изучалась также Куком (1933, 1935) в серии весьма систематических исследований. В его опытах, основанных на оригинальной модификации зеркальной методики, испытуемые должны были стержнем, прикреплявшимся то к руке, то к ноге, и с опорой на зеркальное отражение прослеживать рельефное изображение шестиконечной звезды (см. рис. 5), стороны которои:продолжались чуть дальше точек пересечения (всего 12 таких точек). К этому сводилась первая задача. Во второй надо было пройти лабиринт неправильной формы. В первой задаче регистрировалось время и количество ошибок, во второй - время, необходимое для прохождения через лабиринт.
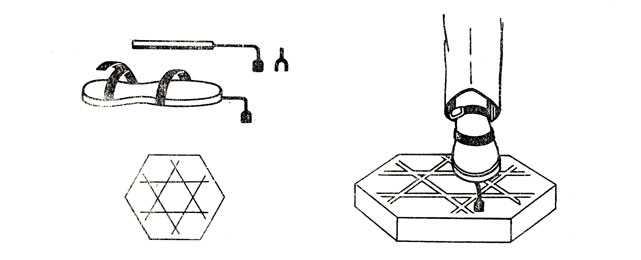
Рис. 5. Рельефный лабиринт в форме звезды, обход которого можно совершать как ногой - с помощью специальной обуви, так и рукой - с помощью стержня. (Модификация рисунка Кука, 1933, стр. 146.)
До начала этих экспериментов Кук обучал испытуемых пользоваться стержнем при прослеживании контура звезды, непосредственно глядя на нее. Затем испытуемые переходили к выполнению серии задач, указанных в приводимой ниже таблице.
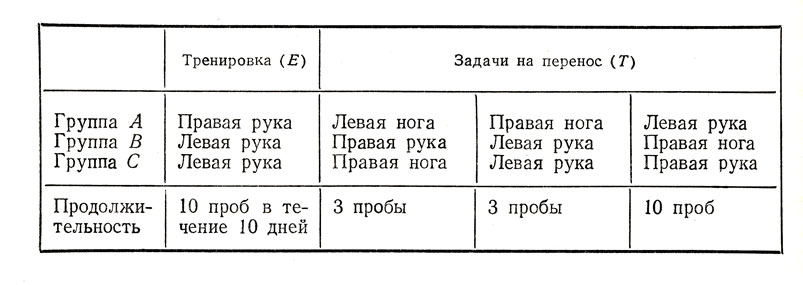
Таблица VII
Кук подсчитывал величину переноса с учетом уровня начального научения. Величина переноса равнялась
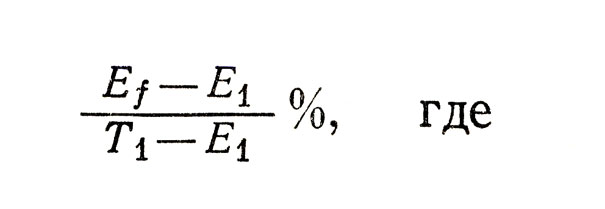
E1 и Ef - соответственно значения успешности в первой пробе и в последней тренировочной пробе. Т1 - результат первой пробы в ситуации переноса. Основные выводы Кука (1935) таковы: 1) наблюдается положительный двусторонний и односторонний (рука - нога одной стороны) перенос; 2) величина переноса определяется характером взаиморасположения конечностей. Величина переноса уменьшается в следующем порядке: она больше всего в случае симметричных конечностей (рука - рука, нога - нога), меньше в случае односторонних (правая рука - правая нога и аналогично с левой стороны) и, наконец, еще меньше в случае перекрестных конечностей (правая рука - левая нога); 3) абсолютное значение величины переноса возрастает с увеличением степени предварительной тренировки; 4) относительная величина переноса возрастает с увеличением результата, достигнутого в ходе первичного научения; 5) эффект переноса постоянен, то есть он сохраняется на протяжении всего периода вторичного научения, по крайней мере это справедливо в отношении односторонних и симметричных конечностей.
С точки зрения Кука, эффект переноса является результатом специфического сенсомоторного научения, не зависящего от рационального знания техники выполнения действий и от эмоциональной адаптации.
Однако относительно недавняя работа Зайди (1956) показывает, что на результаты двустороннего переноса в опытах с рисованием по зеркальному изображению может оказывать влияние фрустрация. Так, до создания ситуации переноса контрольная группа тренировалась, не получая при этом критических замечаний со стороны экспериментатора. Испытуемые экспериментальной группы, напротив, были объектом такой критики. Хотя специально обращалось внимание на то, чтобы к концу предварительной тренировки уровень научения был одинаковым в обеих группах, оказалось, что в ситуации переноса деятельность экспериментальной группы менее продуктивна по сравнению с контрольной. Можно предположить, что состояние фрустрации, порождаемое критикой, приводит к возникновению генерализованной реакции торможения, проявляющейся главным образом в момент выполнения новой задачи.
б) Психофизиологические концепции двустороннего переноса. Каждодневная и одновременная тренировка различных рецепторных органов (особенно глаз и ушей) имеет такой характер, что обязательно возникают связи и условные рефлексы. Известно, что, если мы даже прикроем один глаз, все равно будут происходить реакции адаптации этого глаза (например, конвергенция) под влиянием деятельности второго глаза.
С другой стороны, в опытах по изучению слуха Розенцвейг и Саттон (1958) получили результаты, указывающие на то, что взаимодействия такого рода осуществляются, вопреки данным Кемпа, Коппе и Робинсона (1937), на уровне сенсорных реле. Они показали, что импульсы от ушей взаимодействуют на уровне латерального лемниска.
С точки зрения моторики опыты Лешли (1924) на обезьянах показали центральное происхождение регуляции моторики конечностей. С помощью хирургического вмешательства он отделял моторные зоны левого и правого полушарий, не очень повреждая их при этом, после чего тренировал правую руку обезьяны. Затем он разрушал правую моторную зону и, когда у обезьяны восстанавливалось "функционирование" левой руки, он заставлял ее выполнять ту же задачу, что и раньше, но уже левой рукой. Обезьяна показывала более высокие результаты при работе этой рукой, чем результаты, которые были бы у нее без предварительного научения.
Вудвортс (1950) делает вывод о том, что центры такого научения, судя по тому, что мы знаем о мозге, располагаются, видимо, главным образом в коре, в ее темянных и затылочных премоторных областях. Перенос показывает, что обе руки могут использовать один и тот же мозговой механизм высокого уровня. Новейшие исследования головного мозга подчеркивают чрезвычайную сложность связей между полушариями головного мозга и адаптивную способность конечностей, принимающих на себя функции друг друга. Нейрологические концепции приемлемы на уровне элементарных реакций, но совсем не пригодны для объяснения случаев сложной адаптации. Лешли и Уэйд (1946) пытались объяснить эту генерализацию реакций с помощью теории Павлова. Их точка зрения была далее разработана Мак-Геч и Айрионом (1952, стр. 327), которые связывали процессы двустороннего переноса непосредственно с механизмами генерализации ответа или, скорее, с механизмами, опосредствующими ответ. По их мнению, необходимо проводить четкое различие между генерализацией ответа, в основе которой лежит какое-то генерализующее свойство организма, и генерализацией ответа, основывающейся на каком-нибудь опосредствующем процессе, предполагающем предварительное научение. Первая является первичной генерализацией ответа, тогда как вторая - вторичной генер ализацией.
в) Двусторонний перенос как экспериментальный метод. Двусторонний перенос превратился в метод исследования в той мере, в какой удалось показать, что лежащий в его основе процесс затрагивает связи на уровне коры.
Так, Кимбл (1952) смог продемонстрировать реактивное торможение - Ir, которое развивается в ходе научения и (см. рис. 6) в соответствии с теорией Халла имеет явно центральное происхождение, поскольку оно поддается переносу. В своем опыте Кимбл использовал следящее устройство Кёрса (удерживание стержня на маленькой мишени, укрепленной на краю вращающегося диска). В опыте участвовало две группы испытуемых; одна (экспериментальная) сделала 30 проб левой рукой за 10 сек. без перерыва," после чего отдыхала в течение 5 мин., за которые, как предполагалось, должно было в принципе рассеяться реактивное торможение, накопившееся за время проб; наконец, испытуемые этой группы сделали еще 30 проб за 10 сек., но уже правой рукой. Вторая группа (контрольная) делала то же самое, но не имела отдыха между двумя периодами научения.
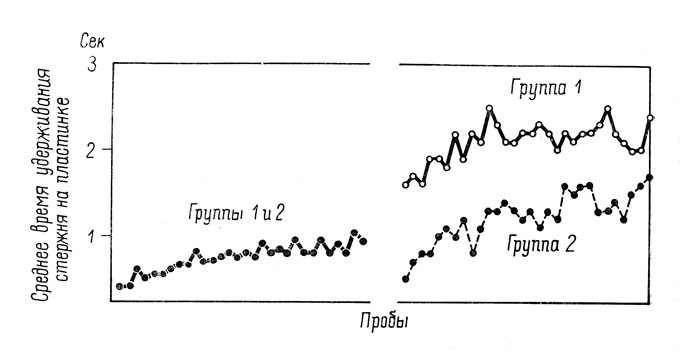
Рис. 6. Среднее время удерживания стержня на мишени у двух групп в процессе предварительной тренировки левой руки и в ситуации переноса навыка на правую руку (группа 1 после отдыха, группа 2 отдыха не имела) (по Кимблу, 1952, стр. 392)
Результаты, представленные на графиках, позволяют утверждать, что продуктивность экспериментальной группы выше по сравнению с контрольной. Налицо, таким образом, развитие реактивного торможения - Ir (как это показывают результаты групп 1 и 2), которое может рассеиваться в период отдыха, о чем свидетельствуют результаты группы 1. Реактивное торможение имеет явно центральное происхождение, поскольку оно распространяется на деятельность левой руки, несмотря на то, что развитие его есть следствие деятельности правой.
Б. Перенос и сенсомоторная адаптация в сложных задачах
Одна из проблем, возникающих в связи с необходимостью управлять различными машинами и устройствами, - это проблема переноса приобретенного навыка. Действительно, навыки и знания, полученные при работе на машине одного типа, должны допускать быструю адаптацию к другим подобным машинам.
Приобретение навыка предполагает прогрессивную интеграцию реакций эффекторов в ответ на стимулы, которые могут появляться либо одновременно, либо в некоторой предсказуемой последовательности, либо в случайном порядке. Образование автоматизмов, обусловленных появлением сигналов, может одновременно вызывать облегчение или интерференцию.
а) Перенос навыков, приобретаемых в повседневной жизни. Мы адаптируемся к сложным задачам с помощью самых разных умений, формируемых потребностями нашей жизнедеятельности. В результате, как подчеркивал Гиббс (1951), происходит образование элементарных схем ответов, которые мы различным образом комбинируем.
Льюис и Шеппард (1951) обнаружили с помощью устройства, имитирующего механизм прицеливания и снабженного двумя элементами управления, что расположение этих элементов и направление управляющих воздействий не может быть произвольным. Существует так называемое "естественное" расположение последних, которое в наибольшей степени благоприятствует научению. В этом случае эффект облегчения связан, видимо, с приобретенными сенсо-моторными навыками.
Шварц, Норрис и Спраг (1953) показали, что в случае устройства, сходного с токарным станком, наибольшая точность достигается тогда, когда рычаг управления левой руки перемещается во фронтальной плоскости, а рычаг правой руки - в плоскости, параллельной средней. Координация движения зависит, однако, от природы выполняемой задачи. Сходство средств реагирования (расположение рычагов управления, кнопок настройки) совершенно не обязательно лежит в основе положительного переноса в условиях, когда стимулы отличаются друг от друга.
Эндрис, Грин и Спраг (1954), экспериментировавшие с двумя регулировочными устройствами, показали фактически, что в случае двух задач, кажущихся очень похожими, больше всего благоприятствует научению обратная организация управляющих воздействий. В первой задаче "pour" испытуемый должен был с помощью двух рукояток совмещать указатель с подвижной точкой - задача на слежение (рис. 7). Во второй так называемой компенсирующей задаче "сотр" испытуемый должен был совмещать точки с координатами, в то время как экспериментатор посредством управляющих движений постоянно смещал ее из исходного положения, эти смещения и должен был компенсировать испытуемый в каждый момент. Оказалось, что задача на слежение всегда легче, чем задача на компенсацию, несмотря на тождественный характер управляющих воздействий. Команды, "привычные" (Говоря "привычные", мы имеем в виду организацию управляющих воздействий, естественную для задачи слежения) в случае задачи "pour", не являются таковыми в случае задачи на компенсацию. В последнем случае у испытуемых, которые должны были удерживать точку в неподвижном состоянии, имелась, если можно так выразиться, иллюзия преследования точки координатами. Таким образом, в случае задачи на компенсацию наиболее эффективными являлись воздействия, оказавшиеся непривычными в случае задачи на слежение.
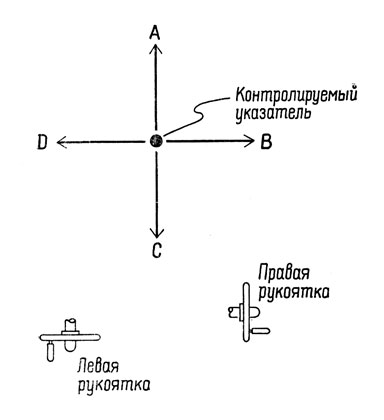
Рис. 7. На рисунке показаны направления смещения указателя, движения которого осуществляются посредством вращения рукояток. Стрелки обозначают направления перемещения указателя в случае так называемой 'привычной' организации управляющих воздействий; в задаче на слежение А указывает на то, что перемещение указателя в этом направлении осуществляется вращением правой рукоятки по часовой стрелке. В указывает на то, что соответствующее перемещение является результатом вращения левой рукоятки по часовой стрелке. С и D - перемещения, осуществляемые вращением соответственно правой и левой рукояток против часовой стрелки (по Эндрису, Грину и Спрагу, 1954, стр. 175)
б) Перенос и модификация устройства. Что произойдет, если после обучения на привычном устройстве перейти на непривычное?
Эндрис, Грин и Спраг (1954) показали, что перенос зависит от природы задач, подлежащих выполнению с помощью новых механизмов. Как и в предыдущем эксперименте, ситуация переноса создавалась посредством перехода от выполнения задачи на слежение к выполнению задачи на компенсирование или наоборот при работе на том же самом устройстве.
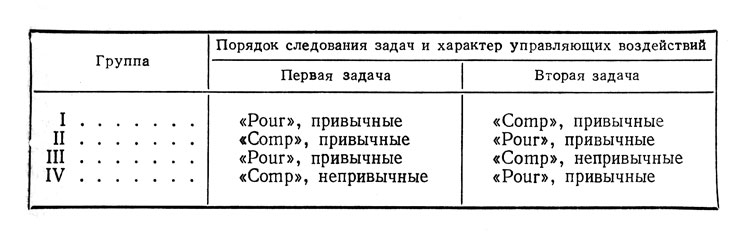
Комбинируя применительно к двум задачам так называемые привычные и непривычные организации команд, авторы создали четыре ситуации переноса. Всего в опытах участвовало 4 группы испытуемых (23 человека), выполнявших две задачи в следующем порядке.
На рис. 8 представлены результаты. Значительный положительный перенос наблюдается только в группе III. В группе I имеется слабый положительный перенос. В двух других группах эффект отрицателен, однако статистически незначим. Таким образом, можно сделать вывод, что расположение или направление вращения рукояток имеет значение только в связи с их ролью в выполнении задачи на регулирование.
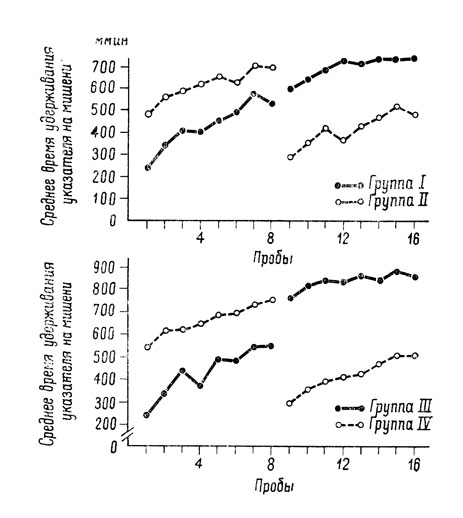
Рис. 8. Среднее время контакта указателя и мишени для четырех групп во время тренировки (пробы 1-8) и в ситуации переноса (пробы 9-16) (по Эндрису, Грину и Спрагу, 1954, стр. 178)
в) Перестановка элементов управления и перенос. С этой проблемой приходится часто сталкиваться в повседневной жизни. Она связана с тем, что в новой машине положение управляющих элементов может быть изменено по сравнению с другой машиной. Так, вождение автомобиля предполагает координированную работу рук и ног и в то же время нарушение некоторых синкинезий (нажимное действие одной ногой и расслабление другой). Педали сцепления, торможения и газа занимают строго определенные места. Можно представить себе состояние водителя, если мы поменяем педали местами.
Тем не менее Дункан (1953) в опытах со звездчатым различием ером показал, что изменение связей между сигналами и соответствующими кнопками (в случае двух последовательных обучений) позволяет всякий раз обнаружить положительный перенос, причем степень его тем выше, чем меньше объем изменений при постоянном числе связей.
Сходные результаты получили Льюис и Шеппард (1950), использовавшие аппарат Мэшберна. Это устройство включало в себя три набора световых сигналов трех разных конфигураций: горизонтальная линия, вертикальная линия, кривая. Стимуляция заключалась в высвечивании одного из набора сигналов (красных). Ответ испытуемого сводился к зажиганию одного из набора сигналов (зеленых), имевшего в точности такую же конфигурацию, что и соответствующий стимул, и располагавшегося под или рядом с ним. Благодаря ранее установленным связям можно объединить каждый из трех наборов сигнал - ответ с одним из трех элементов управления, например с двумя педалями и штурвалом, аналогичным авиационному. В зависимости от степени нажатия на педаль и наклона штурвала зажигался либо тот, либо другой сигнал набора.
С помощью этого прибора создавались различные ситуации переноса путем изменения связей между сигналами и ответами. В каждой из них наблюдался положительный перенос, несмотря на временное увеличение ошибок вначале. Другими словами, испытуемые значительно быстрее корректировали свою деятельность в начале вторичного научения, чем в начале первичного, - они уже были адаптированы к типу задачи и усвоили способ научения.
На основании этих результатов можно сделать вывод, что для того, чтобы предсказать эффект переноса, необходимо знать: 1) спонтанные тенденции управления движениями; 2) уровень трудности следующих друг за другом задач; 3) соответствующие этим задачам механизмы координации, ответственные за процессы интеграции перцептивной и моторной деятельности.
Summer dresses for everybody, read more.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить активную ссылку на страницу источник:
http://psychologylib.ru/ 'Библиотека по психологии'