Построение структурных моделей деятельности путем априорной алгоритмизации (Г. В. Суходольский)
При проектировании систем "человек-техника" все большее распространение приобретают методы построения структурных моделей деятельности путем априорной алгоритмизации. Под априорной алгоритмизацией деятельности специалиста будем понимать процесс последовательного анализа и синтеза иерархической системы целей (задач), возникающих перед специалистом, условий их возникновения (режимов работы) и правил поведения (алгоритмов), приводящих в заданных условиях к достижению определенной цели. Методы априорной алгоритмизации в основном изложены в [1]. Однако вопрос о получении оценок для взвешивания частных алгоритмов и о способах синтеза более крупных структур из подструктур, описываемых на уровне частных алгоритмов, разработан недостаточно. Субъективные методы ранговых оценок частоты и важности использования специалистом средств контроля и управления а также связей между ними, предложенные в ряде работ (на-пример [2]), непригодны из-за неадекватности субъективных оценок в случае значительного числа средств контроля и управления (более десяти). В данной работе излагается один практический способ построения операционно-логических и предметно-функциональных структурных моделей деятельности специалиста*.
* (Понятия OЛ- и ПФ-моделей деятельности в общем виде рассмотрены в статье: Суходольский Г. В. Абстрактная модель деятельности специалиста и ее реализации. - Вестн. Ленингр. ун-та, 1972, № 11, с. 92-95.)
Пусть в терминах, используемых при автоматизации объектов управления, определены l задач и m режимов работы специалиста, причем в силу некоторой энтропии ситуации решение i-й задачи (i=1,2, ..., 1) в r-ом режиме (r=1,2, ..., га) возможно n способами, так что i-й способ (i=1,2, n) выбирается специалистом смотря по обстоятельствам, либо из числа заученных в предыдущей профессиональной жизни, либо благодаря эвристической деятельности. Иначе говоря, i-ая задача решается специалистом по гибкому алгоритму, каждая реализация которого есть конечная жесткая последовательность сенсорных, моторных и логических операций, имеющая частоту frij и матрицу смежности операций Arij.
Перечисляя реализации гибкого алгоритма i-й задачи, можно установить полное множество всех сенсорных, моторных и логических операций, необходимых и достаточных, согласно имеющейся априорной информации, для решения специалистом i-й задачи. Это множество образует столбцы и строки матрицы i-ro алгоритма в r-ом режиме (Bri). Если матрицу Arij рассматривать как реализацию матрицы Bri то, очевидно,
Аналогично получаем матрицу Cr для r-го режима работы специалиста:
где fri - частота реализации Bri в матрице Cr, а также матрицу D, эквивалентную ОЛ-модели деятельности при всех m режимах:
где fr - частота r-го режима работы, Обобщая (1), (2) и (3), получаем аддитивную модель для синтеза целостной деятельности из "элементарных" алгоритмов:

Рассмотрим на примере некоторые существенные детали предлагаемого подхода.
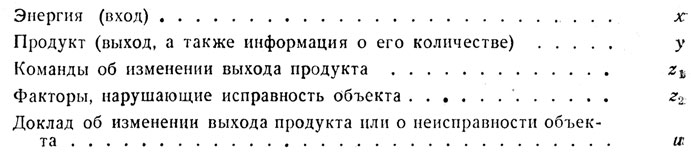
Пусть имеется система управления, состоящая из объекта и специалиста (ниже приведена спецификация параметров алгоритма задачи):
Для простоты ограничимся априорной алгоритмизацией задачи "изменить выход продукта на заданную величину".
В распространенной записи алгоритм этой задачи в аналитической форме имеет вид:
где z1, z2, x, y, u - текущие значения параметров,
q1=0 - объект неисправен,
q1=1 - объект исправен,
q2 - заданное изменение y достигнуто,
q2 - заданное изменение y не достигнуто,
ω=0 - логические операторы, организующие управление. Форма (5); не дает, однако, сведений ни о частоте реализаций алгоритма (fj), ни об их количестве. Один из возможных способов получения таких сведений основывается на том очевидном обстоятельстве, что частота оператора есть функция исходов опыта. Но исходы опыта можно перечислить и априорно как возможные реализации формы (5), получаемые по комбинациям значений логических условий:


Заметим, что последняя реализация (5.3)* не определена, так как заканчивается циклом
из которого не указано правило "выхода". 82
Очевидно, любой цикл для устойчивого регулятора должен иметь конечную, причем небольшую по величине, степень. Для человека в подобных задачах, как показали теоретические выкладки А. И. Губинского и данные эксперимента [3, 4], вероятность повторения такого цикла ровно k раз, после чего реализуется (5.2), подчиняется геометрическому распределению
параметры q и p которого зависят от обстоятельств. На основании обобщения опытных данных можно принять оценки вероятностей P(k), представленные в табл. 1. Можно видеть, что с вероятностью P [k≤4]=0,87 реализуются варианты алгоритма (5), включающие циклы со степенями k=0÷4. Тогда, рассматривая реализацию (5.2) как имеющую этот цикл в нулевой степени, можем перечислить дополнительно четыре реализации:

где степень цикла изображена в виде показателя степени у квадратных скобок, заключающих символическую запись цикла.
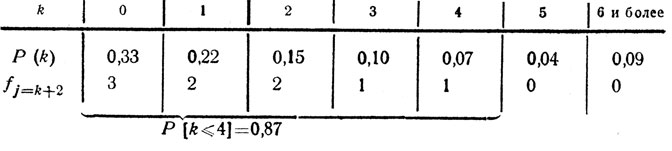
Таблица 1. Статистические характеристики цикла k-й степени
Таким образом, с достаточной вероятностью возможны пять реализаций гибкого алгоритма (5), описывающие управление при неисправности объекта.
Для получения ОЛ-модели на уровне отдельного гибкого алгоритма, согласно уравнению (1), необходимо построить матрицу смежности вершин. Так как в алгоритме (5) всего восемь вершин (семь операций, за восьмую вершину принимается внешняя среда), то матрица Aj имеет порядок 8 и содержит 56 элементов. Нетрудно, однако, видеть, что только 9 из них отличны от нуля, т. е. дуги связывают, как устанавливается по реализациям (5.1) - (5.6), только девять пар вершин. В целях экономии можно поступить следующим образом.
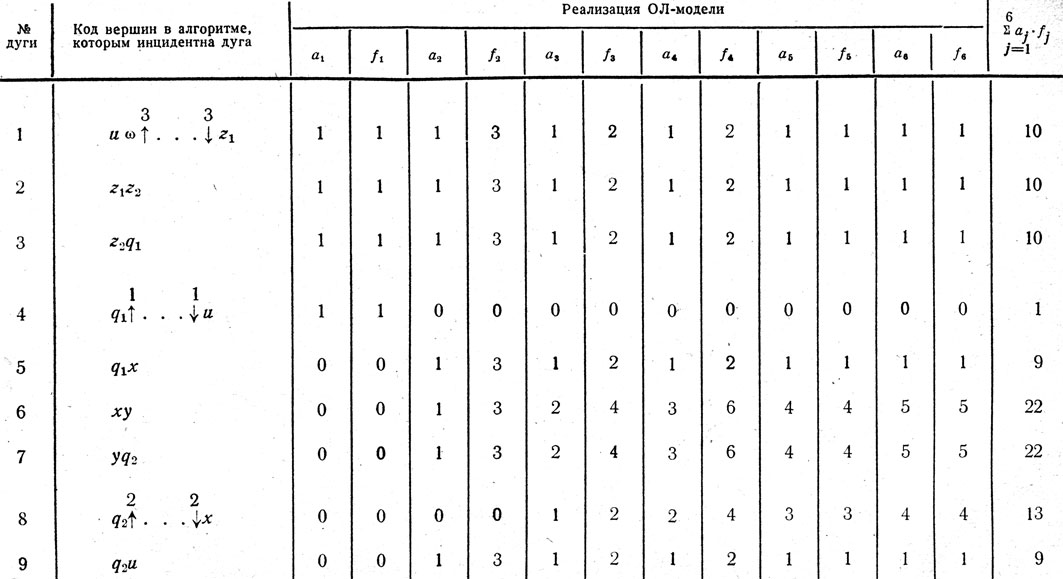
Таблица 2. Сокращенный табличный способ синтеза OЛ-модели по реализациям алгоритма задачи
По реализациям алгоритма выписываются пары вершин (в кодах операций алгоритма), в первой из которых начинается, а во второй кончается дуга ненулевой частоты. Далее, как это сделано в табл. 2, реализации алгоритма записываются в виде векторов-столбцов (или строк), элементы которых суть дуги либо с невзвешенной частотой aj, либо со взвешенной частотой fj=k+2, значения которой приведены в табл. 1 (при j=1 примем fj= 1, так, чтобы Σj=1fj=k+2=10). Из табл. 2 нетрудно видеть, что для каждой реализации первый столбец aj умножается на второй столбец fj, после чего результаты складываются. Таким образом, в последнем столбце получаются элементы матрицы Bi смежности вершин орграфа ОЛ-модели для алгоритма (5), по которым легко записать эту матрицу в обычном, полном виде.
Заметим, что в моделях (1)÷(3) для каждой вершины сумма "входящих" дуг должна быть равна сумме дуг "исходящих", это правило выполнено для реализаций, записанных в табл. 3, и служит для проверки правильности построения моделей.
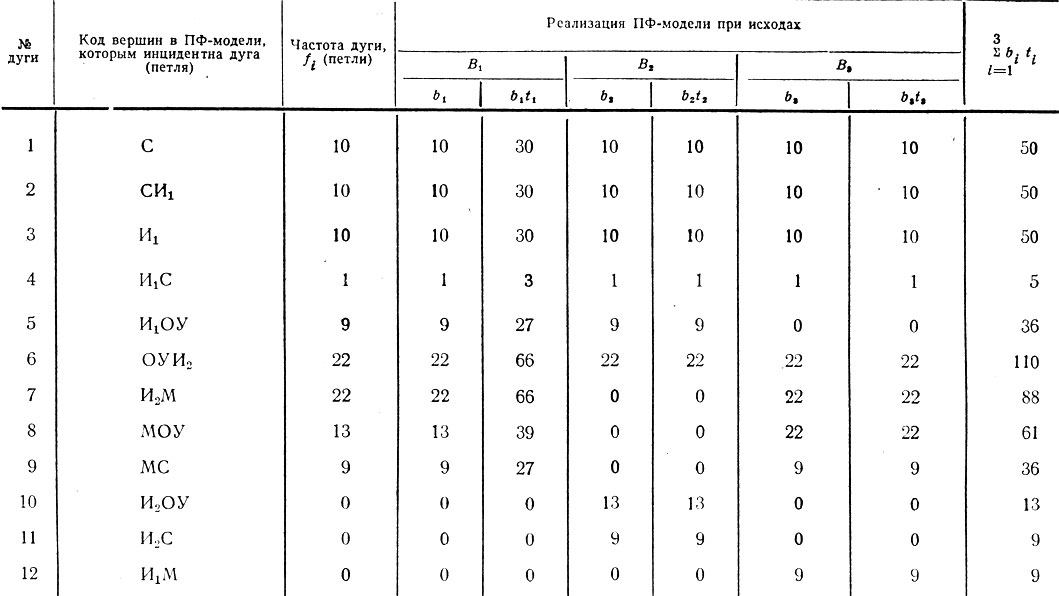
Таблица 3. Сокращенный табличный способ синтеза ПФ-модели по трем ее реализациям
Переход к ПФ-модели состоит в том, что сенсорные, моторные и логические операторы "материализуются" в средства контроля и управления. Так, в рассматриваемом примере для операций z1 и u, средства получения команд и докладов можно объединить в селекторе (С). Пусть состояние исправности объекта сигнализируется индикатором И1 значения y - индикатором И2, а значения x изменяются органом управления ОУ. Тогда логический оператор q1 "поглощается" индикатором И1, а q2 "материализуется" в виде мнемоники М - списка значений x, соответствующих требуемым уровням y.
Собственно преобразование ОЛ-графа в ПФ-граф состоит в том, что множество вершин, изображающих средства контроля и управления, на схеме соединяется дугами в соответствии с исходным ОЛ-графом. Менее наглядно эта процедура выполняется в полной или сокращенной матричной форме, например, как показано в табл. 3, где в трех первых столбцах записана ПФ-модель, эквивалентная ОЛ-модели, полученной в табл. 2.
Заметим, что, как и для ОЛ-модели, для ПФ-модели возможны различные реализации, структуры которых зависят от многих обстоятельств. В частности, существенными являются психофизиологические свойства и состояния специалиста. Множества таких состояний, вообще говоря, счетны, но перечислить соответствующие им реализации затруднительно. Так, например, если учитывать в рассматриваемом случае только два состояния памяти относительно заданных, и текущих значений x и y, то возможны 16 исходов с различными графами, которые должны войти в аддитивную ПФ-модель. В этой связи важной теоретической и практической задачей является установление меры деталировки реализаций в зависимости от числа психофизиологических переменных, которые на этапе проектирования информационной модели необходимо и достаточно учитывать, хотя бы для получения подходящих оценок частоты вершин и дуг результирующего ПФ-графа. Формулируя эту задачу, мы в настоящее время далеки от ее общего решения. Одним из гипотетических частных решений может быть следующее.
Ограничим число реализаций ПФ модели тремя достаточно очевидными исходами B1, B2 и B3, где B1 соответствует деятельности обученного специалиста, всегда выполняющего поблочный контроль правильности выполнения команды. Этот исход был априорно "заложен" в алгоритме (5) и реализуется в ПФ-графе "b1" (табл. 3). Исход B2 соответствует деятельности обученного специалиста, "самонадеянно" использующего свой профессиональный опыт и не выполняющего по этой причине инструкцию о поблочном контроле; поэтому здесь мнемоника не используется (реализация "b2", табл. 3). Исход B3 соответствует деятельности малообученного или "робкого" специалиста, контролирующего по мнемонике каждое свое сенсорное и моторное действие (табл. 3, реализация "b3").
Используя модель (2), определим оценки весовых коэффициентов ti (i=1, 2, 3), исходя из следующих правдоподобных допущений. Пусть профессиональная деятельность осуществляется в течение 25 лет, из которых 5 лет специалист обучается. Пусть, далее, в одной четверти случаев обученный специалист по тем или иным причинам не использует мнемонику. Тогда получим:
где P(B3)=0,2; P(B1+B2)=0,8; P(B2)=0,25XP(B1+B2)=0,2; P(B1)=0,6, т. е. t1=3, t2=t3=1. Реализации ПФ-модели алгоритма (5), взвешенные этими коэффициентами, представлены в соответствующих столбцах табл. 3, а в последнем столбце приведена сумма этих реализаций. По ней легко восстановить матрицу смежности вершин ПФ-орграфа, используемого при проектировании и исследовании информационных моделей.
Указатель литературы
1. Надежность комплексных систем "человек-техника". Вып. 2. Л., 1969, с. 16-20.
2. Зараковский Г. М. Психофизиологический анализ трудовой деятельности. М. 1965. 114 с.
3. Никифоров Г. С. Самоконтроль оператора при приеме информации от измерительного прибора. - В кн.: Экспериментальная и прикладная психология. Вып. 2. Л., Изд-во Ленингр. ун-та, 1970, с. 38-43.
4. Суходольский Г. В. О характеристиках человека при слежении. Автореф. канд. дис. Л., Изд-во Ленингр. ун-та, 1968. 12 с.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить активную ссылку на страницу источник:
http://psychologylib.ru/ 'Библиотека по психологии'